Wrist Bot Drummer Principle with Model of Actuator Added
The actuator that I've purchased for building a single stick prototype of Wrist Bot has 16mm travel. So, working on rough lever lengths, here are images of how the wrist flick a human drummer uses actually works. The first image is stick at rest, the second image is stick flicked, showing the stick at point of contact with the drum skin. By pivoting the stick around its balance point, the stick rotates beyond the angle the actuator pulls its cradle, hits the skin and rebounds back to the cradle. By holding the actuator in the pulled position, the stick can bounce after rebound to come back for a second hit, potentially allowing for "crushed rolls" and other rebound effects a real drummer plays. Quickly snapping the actuator back to rest after the drum is hit prevents double taps.
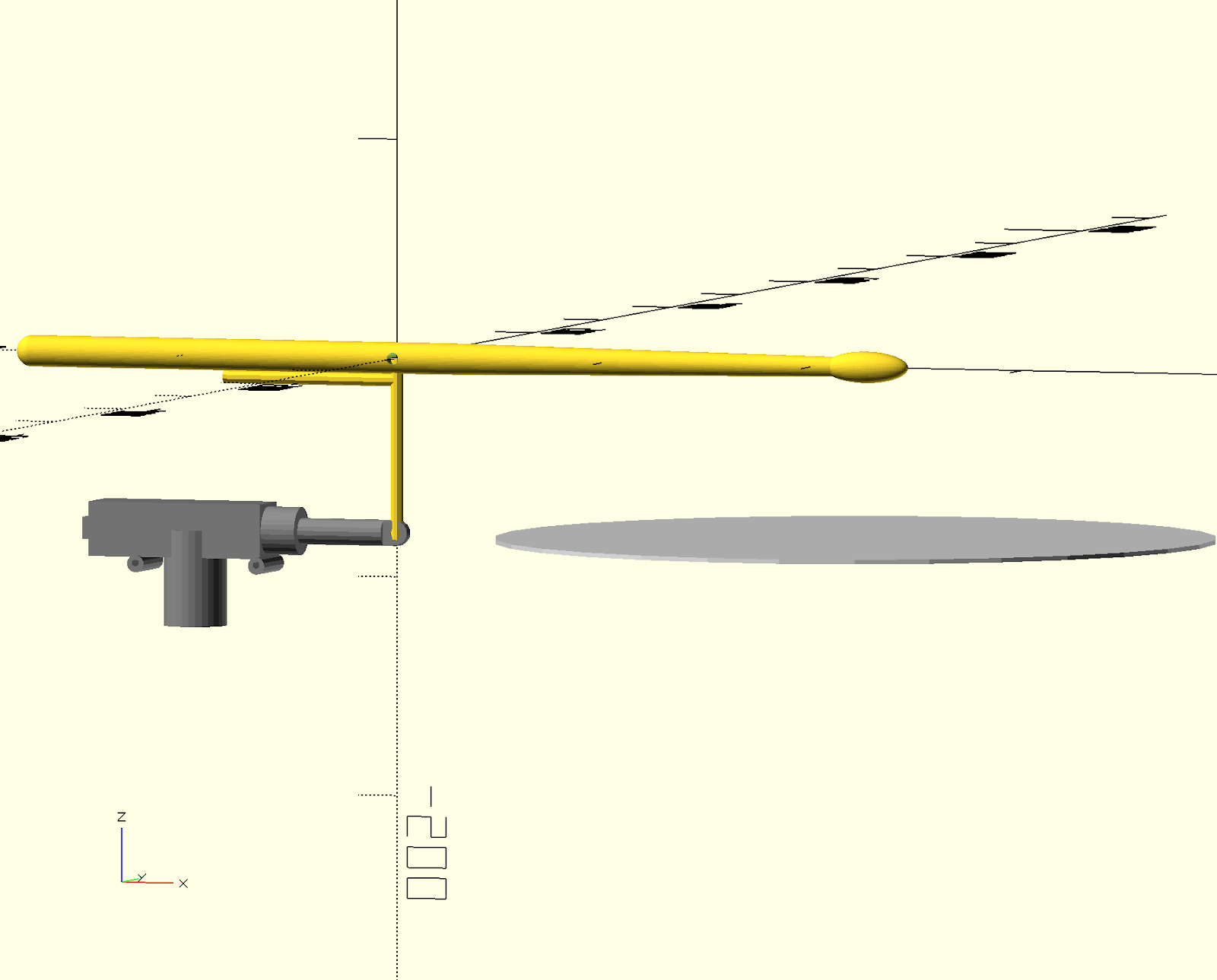 Image 1: stick at rest
Image 1: stick at rest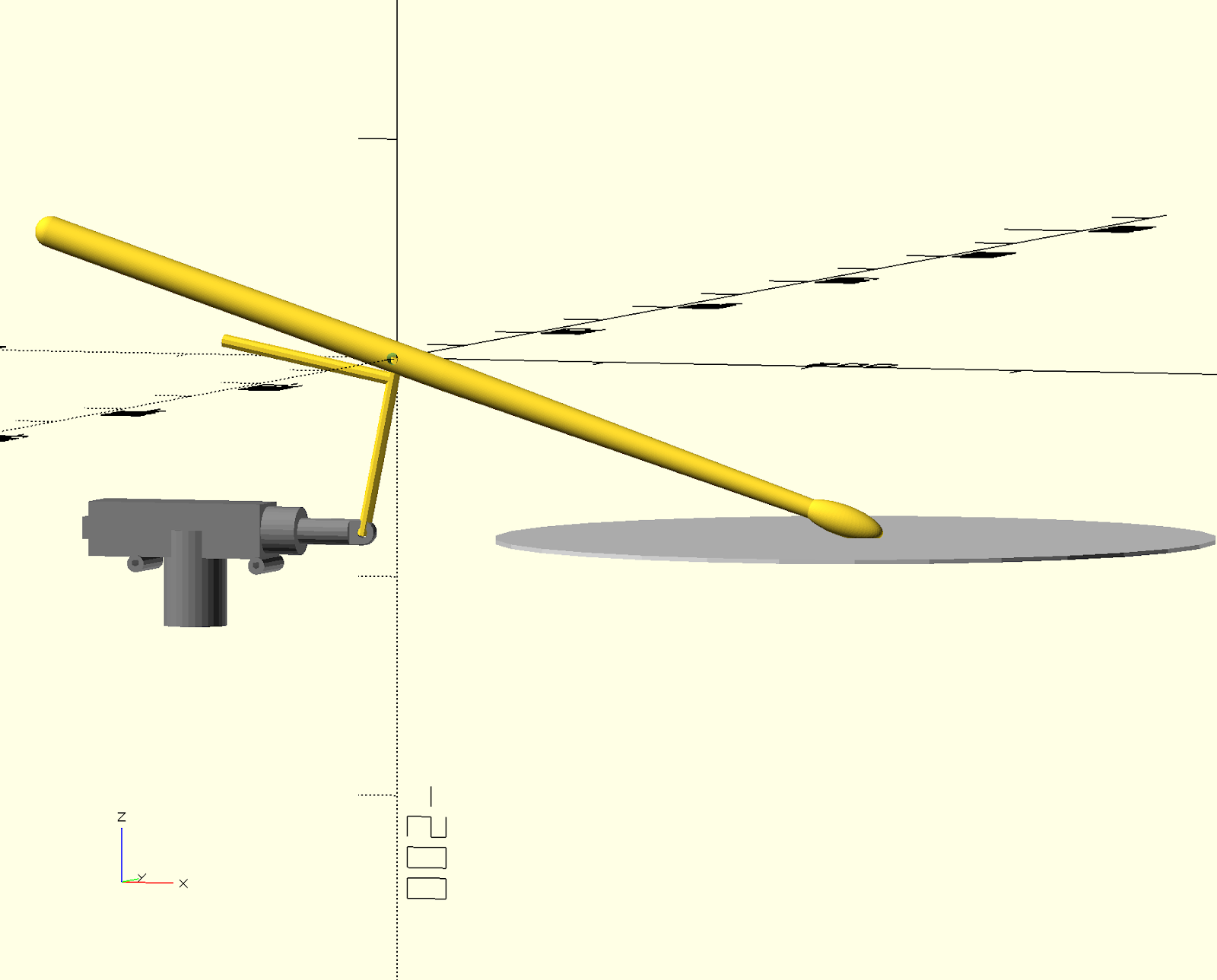 Image 2: stick flicked to skin contact point
Image 2: stick flicked to skin contact pointNote the increased angle of the stick at full contact, after being flicked. The dual-pivot approch, while trickier to setup right, will provide more natural sounding drums than simply pulling the stick onto the skin directly. It also offers better velocity control via the MIDI signal that will drive the individual stick assemblies. A light touch at low MIDI velocity will result in a light tap and rebound, a high velocity, a sharp crack.


Comments
Post a Comment